

Shaohui Yang was born in Beijing, China in 1997. He obtained B.Eng. degree in computer science from the Hong Kong University of Science and Technology (HKUST), Hong Kong SAR, China in 2019, and will be graduating with M.S. degree in Systems, Control and Robotics from KTH Royal Institute of Technology, Stockholm, Sweden in 2021. Conducted in Robotics Systems Lab (RSL) at ETH Zurich, his master thesis focused on model predictive control, trajectory optimization and generation for quadrupedal robots. He has experienced in different robotics research aspects such as estimation, perception, planning and control and various kinds of robotics hardware platforms such as quadrotors, legged robots and autonomous vehicles.
Project description
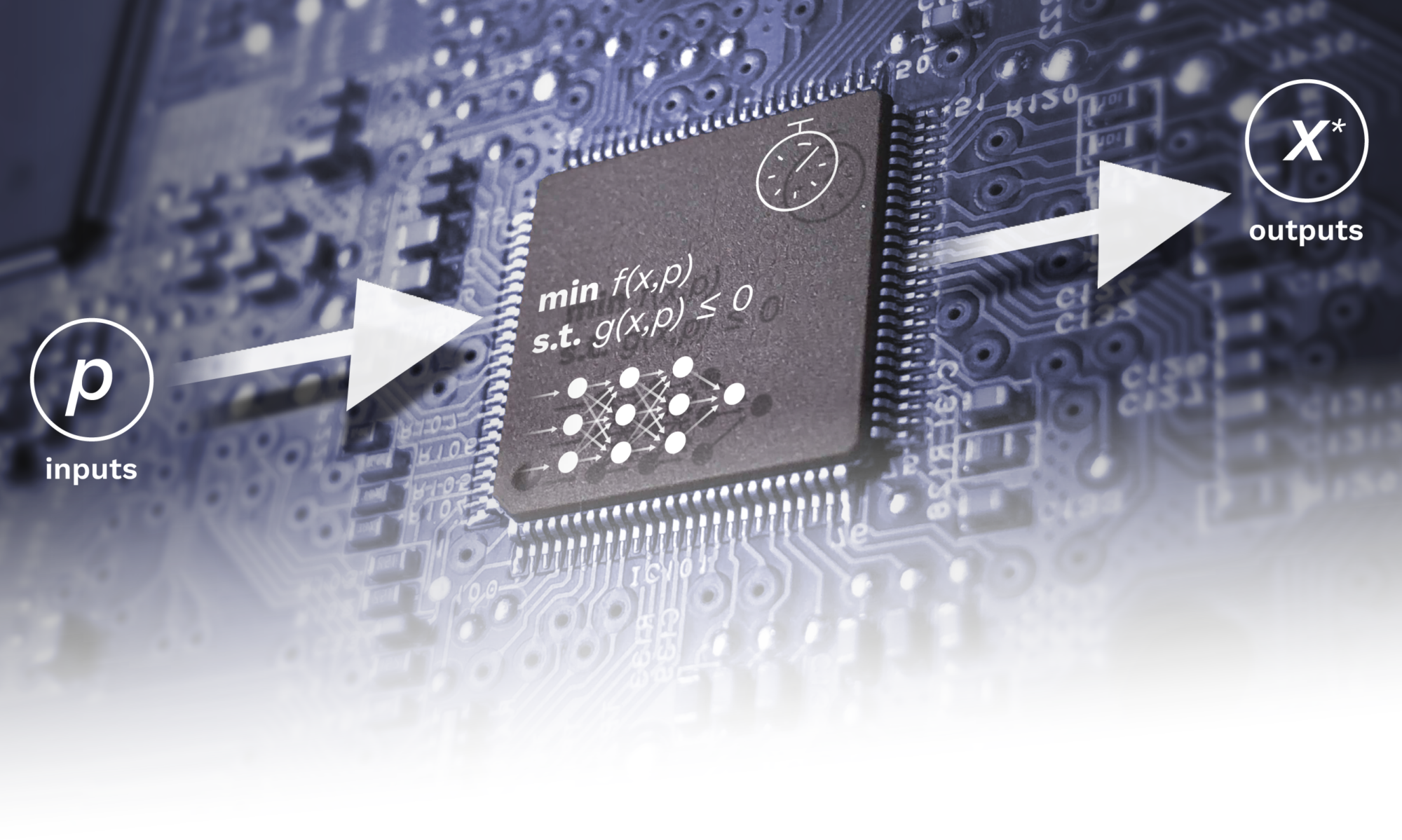
Bringing adaptive and learning-based control, coupled with advanced optimization tools for planning, predictive control and estimation to embedded platforms promises ease of design and deployment, as well as improved performance for a broad range of application areas. There are, however, a large number of challenges to overcome before such data-driven control methods are commonplace. This project will focus on a key area: computational methods for the deployment of real-time embedded predictive control based on data-driven and adaptive models.
The specific direction of the research project will be developed in collaboration with the PhD fellow, but two exciting and indicative directions are:
- Development of predictive control and moving horizon estimation approaches arising from recent work in Koopman operator theory leading to convex optimization problems for data-driven non-linear models. The potential is for extremely fast data-driven control from data.
- Real-time embedded optimization approaches handling the extreme non-convexity arising when using predictive models based on robust kernel learning and/or deep kernel learning for MPC. The potential here is to go from data to reliable, safety-first control of highly complex nonlinear systems.
The project will involve a mix of control theory, machine learning, numerical optimization, software development and practical expertise. A key output of the project will be open-source software building on the group’s development of the polyMPC tool.
In addition, practical studies will be undertaken both utilizing and informing the fellow’s research in collaboration both with other researchers in the lab, as well as with ELO-X partners through secondments.